克里金法的命名來自於南非金礦工程師丹尼·克里格(Danie G. Krige),以紀念其使用回歸方法對空間場進行預測的開創性研究。克里金法(普通克里金)的提出者為法國統計學家喬治斯·馬瑟倫(Georges Matheron),在其1963年發表的著作Principles of geostatistics中,馬瑟倫將克里金法定義為“對已知樣本加權平均以估計平面上的未知點,並使得估計值與真實值的數學期望相同且方差最小的地統計學過程”
(原文)“...a geostatistical procedure called "kriging" ... consists in estimating the grade of a panel by computing the weighted average of available samples,..., we attempt to evaluate the unknown grade z of the panel with a linear estimator
…
and
must have the same average value within the whole large field … the (weights) have such values that estimation variance of
在大氣科學領域,前蘇聯氣象學家列夫·舍米諾維奇·加丁(Лев Семено́вич Гандин)在其1963年發表的著作“氣象場的客觀分析(Objective analysis of meteorological field)”中開展了與馬瑟倫相同的工作。在該著作1965年的英語譯本中,簡單克里金被稱為“最優插值(optimum interpolation)”、普通克里金被稱為“歸一化權重最優插值(optimum interpolation with normalization of weighting fuctors )”、協同克里金被稱為“最優空間場匹配(optimum matching of flelds)”。加丁在其著作中同樣發展了克里金法的BLUP理論並討論了克里金法在氣象領域的套用。
在高斯過程領域,安德雷·柯爾莫哥洛夫(Андрей Николаевич Колмогоров)和羅伯特·維納(Robert Wiener)在二十世紀40年代開展了包括線性預測和BLUP理論在內的工作,並將其套用於時間序列數據中,被後世稱為維納-柯爾莫哥洛夫濾波器(Wiener-Kolmogorov filter)的信號處理技術是與克里金法十分接近的求解系統。隨後在70年代,高斯過程理論和貝葉斯推斷被逐步套用於空間場的研究,促進了克里金法的發展。
與高斯過程回歸(GPR)的關係:GPR是與克里金法相近的非參數模型,常見於機器學習領域。若協方差函式的形式等價,簡單克里金和普通克里金的輸出與GPR在正態似然下輸出的數學期望相同。GPR與克里金法的不同點在於,前者假設隨機場為高斯過程並給出其對測試樣本後驗的完整分布;後者假設隨機場為固有平穩過程並給出其對測試樣本的最優無偏估計。此外,一些貝葉斯克里金方法,例如Handcock算法與GPR是等價的,可參見Handock and Stein (1993)。

 …
… and
and must have the same average value within the whole large field … the (weights) have such values that estimation variance of
must have the same average value within the whole large field … the (weights) have such values that estimation variance of ,… should take the smallest possible value.”
,… should take the smallest possible value.” 有隨機過程
有隨機過程 且
且 被稱為隨機場。克里金法中隨機場所對應的指數集通常為地理坐標,而隨機場內每一個點的測度都是一個隨機變數,服從特定的機率分布。
被稱為隨機場。克里金法中隨機場所對應的指數集通常為地理坐標,而隨機場內每一個點的測度都是一個隨機變數,服從特定的機率分布。















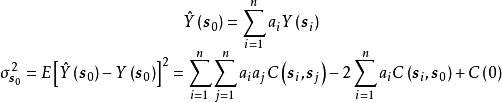















 置信區間:
置信區間:

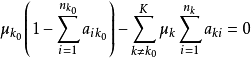
 的線性組合:
的線性組合:






 。
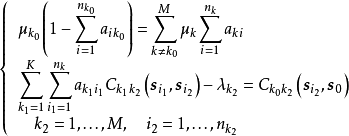
。 擁有M個協變數
擁有M個協變數 且每個變數擁有
且每個變數擁有 個樣本,則協同克里金的最佳化問題和克里金方差有如下表示:
個樣本,則協同克里金的最佳化問題和克里金方差有如下表示:





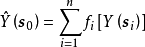







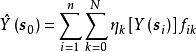










,克里金殘差(右),組合(下)") 神經網路克里金,ANN輸出(左),克里金殘差(右),組合(下)
神經網路克里金,ANN輸出(左),克里金殘差(右),組合(下) ,在實際套用中難以滿足;Handcock算法不要求協方差函式已知,而是將其表示為馬頓核(Matérn kernel)形式的高斯過程先驗並使用極大似然估計(Maximum Likelihood Estimation, MLE)求解超參數。兩種算法都以高斯隨機場為前提,且後者是與高斯過程回歸等價的方法。對非高斯隨機場,Handcock算法有貝葉斯高斯變換(Bayesian Transformed Gaussian, BTG)算法。而對更一般的各向異性隨機場,以及有同時包含空間和時間觀測樣本的情形,可以使用等級貝葉斯克里金(hierarchical bayesian Kriging)。該方法可以對非平穩隨機場使用,其中協方差函式完全由超參數進行模擬。
,在實際套用中難以滿足;Handcock算法不要求協方差函式已知,而是將其表示為馬頓核(Matérn kernel)形式的高斯過程先驗並使用極大似然估計(Maximum Likelihood Estimation, MLE)求解超參數。兩種算法都以高斯隨機場為前提,且後者是與高斯過程回歸等價的方法。對非高斯隨機場,Handcock算法有貝葉斯高斯變換(Bayesian Transformed Gaussian, BTG)算法。而對更一般的各向異性隨機場,以及有同時包含空間和時間觀測樣本的情形,可以使用等級貝葉斯克里金(hierarchical bayesian Kriging)。該方法可以對非平穩隨機場使用,其中協方差函式完全由超參數進行模擬。