欠驅動系統是輸入比要控制的量少的一類典型系統。當驅動器故障時,可能使完全驅動系統成為欠驅動系統,欠驅動控制算法可以起到容錯控制的作用。從控制理論的角度看,欠驅動系統控制輸入的限制是具有挑戰性的控制問題,研究欠驅動機械系統的控制問題有助於非完整約束系統控制理論的發展。
基本介紹
- 中文名:欠驅動系統
- 外文名:Underactuated Systems
- 特點:輸入量少於控制量
- 挑戰:控制輸入的限制
名詞解釋,典型的欠驅動系統,倒立擺系統,垂直起降飛行器,柔性機械手,
名詞解釋
欠驅動系統是指系統的獨立控制變數個數小於系統自由度個數的一類非線性系統,在節約能量、降低造價、減輕重量、增強系統靈活度等方面都較完全驅動系統優越。欠驅動系統結構簡單,便於進行整體的動力學分析和試驗。同時由於系統的高度非線性、參數攝動、多目標控制要求及控制量受限等原因,欠驅動系統又足夠複雜,便於研究和驗證各種算法的有效性。
典型的欠驅動系統
橋式吊車、倒立擺系統、垂直起降飛行器、柔性機械手等都是典型的欠驅動系統。
倒立擺系統
取一級倒立擺小車質量為 ,擺的質量為
,擺的質量為 ,小車的位置為
,小車的位置為 ,擺的角度為
,擺的角度為 ,動力學方程為
,動力學方程為






針對倒立擺模型,取控制變數為4個,即單級倒立擺的擺角 、擺速
、擺速 、小車位置
、小車位置 和小車速度
和小車速度 。控制的目標是通過給小車底座施加一個力
。控制的目標是通過給小車底座施加一個力 ,使小車停留在零位置,並使桿不倒下。倒立擺系統的控制問題一直是控制研究中的一個典型問題。
,使小車停留在零位置,並使桿不倒下。倒立擺系統的控制問題一直是控制研究中的一個典型問題。
垂直起降飛行器
垂直起降飛行器一般指戰鬥機或轟炸機。該飛行器可實現飛行器自由起落,從而突破跑道的限制,具有重要的軍用價值。其動力學模型為





柔性機械手
柔性關節機器人動力學模型可表示為
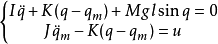
其中, 分別表示連桿和轉子的角位置,
分別表示連桿和轉子的角位置, 分別表示連桿和轉子的轉動慣量,
分別表示連桿和轉子的轉動慣量, 代表關節剛度係數,
代表關節剛度係數, 分別為連桿質量、重力加速度和連桿重心至關節長度,
分別為連桿質量、重力加速度和連桿重心至關節長度, 表示電機轉矩輸入。
表示電機轉矩輸入。
